ヘリコプターは、適切な飛行姿勢を作り出すためにそのローターブレードの角度を回転角度に応じて変化させている。すなわち、前傾姿勢になりたければ、ブレードが前方に位置したときには揚力が減る角度とし、ブレードが後方に位置したときには増える角度とする。これを実現するため、ヘリコプターのローター部分は回転力を伝えるメインマストと、ローターとともに回転しつつローターの角度を制御するリンク機構、そしてリンク機構の角度を作り出すスワッシュプレートから成る。

{kind=link}
この方式は長年使われてきたが、ローター角度がスワッシュプレートだけで決まるために角度制御の自由度が少なく、振動抑制や効率改善に限界があった。この限界を打破すべくシコルスキー社がZFL社と共同で開発しているのが個別ブレード制御による電動ローター制御システムである。これについてdSPACEマガジン2/2020のpp. 14-19に記事があったので、かんたんに紹介する。以下、画像は全て同記事からのものである。また、詳しい内容は同記事を参照のこと。
何が良くなるか
スワッシュプレートはシンプルだが、シンプルゆえにローターの位置とローター角度の関係は単純なものに制限された。スワッシュプレートを廃してブレード角度を個別に電動制御できるようになると、以下が実現できる。
- 放射雑音の低減
- 効率UP (ローターの出力要件削減)
- 機体振動の削減
- 特定ブレードに欠陥が生じた場合のリカバリ
- 地上共振(洗濯物が偏った洗濯機のように、地上でローターがガタガタしてしまう現象)の抑制
- (他に油圧制御システムがなければ)可燃性の高い油圧系統の撤廃
何が課題か
シンプルで、機構が壊れていなければ確実に動作するスワッシュプレートと異なり、電動ローター制御システムは以下の課題がある。
- センサや制御回路、アクチュエータの故障耐性確保
- アクチュエータの出力確保
- システムの軽量化
記事ではシステム構成と故障耐性確保、評価に使ったdSPACEシステム構成について触れられていた。以下、システム構成と故障耐性確保方法について簡単に触れる。
LIBRASローターハブ
従来のローターハブに存在したスワッシュプレートやプッシュロッド等にかわり、ブレードルートアクチュエータやパワーエレクトロニクス系を搭載する。

回転フレーム側には電気機械式アクチュエータ(EMA)やアクチュエータ出力制御ユニット(APCU)、ロータ方位角センサ、データ取得システムを搭載する。
非回転フレーム側、つまり機体側には飛行制御コンピュータやパイロット制御コンソール、高調波コントローラ等を搭載する。テストベンチではこれに加えゲート検証システムやテスト制御コンピュータ、電源等を用意する。

センサやアクチュエータ、制御系は3重系となっており、回転フレーム側と非回転フレーム側の接点は3重冗長スリップリングとなっている。
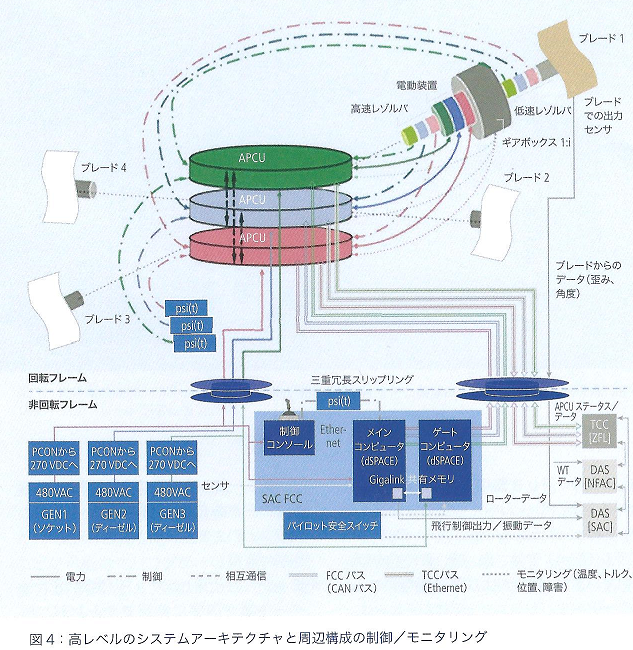
本文では言及が無かったが、ローターが4枚あるにも関わらず基板は3分割となっていた。このことから、配線は面倒になるが4ローター分の制御回路を1基板にまとめ、それを3重系ぶん用意したものと思われる。これは恐らく、異物衝突やローター破損により物理的ダメージを負う基板の破損箇所を局在化し、3重系をうまく冗長的に動かすためと思われる。

現状と今後の予定
コンポーネントレベルの開発は完了済み、サブシステムレベルの開発は完了間近でシステムレベルの開発は開始済みの模様。p.14-15には風洞試験の準備中と思われる写真も掲載されていた。